机械臂体验
更新-260407 | 发布-260330
注意事项
🚫 禁止:不要搬动机械臂。否则机械臂会抓不准。
🚫 禁止:不要搬动机械臂。否则机械臂可能从桌面六边形空洞掉下去,造成损坏。
🚫 禁止:机械臂在运动时,不要用肢体去触碰机械臂。以防人体受到伤害,或者损坏机械臂。
🚫 禁止:不要玩弄图纸。否则容易造成图纸破损。
🚫 禁止:不要撕开积木上的贴纸。否则容易机械臂无法识别积木造成图纸破损。
🚫 禁止:水杯、水瓶等,不要放在桌子上。临时放在桌子上,一定要拧紧盖子。否则液体泼洒出来,会损坏机械臂。
✅ 建议:机械臂抓取时如果不大准确,可用手微微移动积木以辅助。(也可通过修改样例程序的配置文件来实现)
上电开机
- 机械臂配有 1 个电源,一端连机械臂,另一端插头插在桌子下面的插座上。
- 桌子下面有个带开关的的立方体插座。按下开关,电源指示灯亮,即表明接通电源。
- 稍等片刻可完成启动。机械臂站立起来,且屏幕显示 Ubuntu 的主界面,就启动完成。
启动和退出样例demo
-
进入样例demo程序所在目录
cd ~/viki -
执行
conda activate viki激活体验虚拟环境jetson@jetson-Yahboom:~/viki$ conda activate viki (viki) jetson@jetson-Yahboom:~/viki$虚拟环境激活后,命令行提示符首部有
(viki)字样:(viki) jetson@jetson-Yahboom:~$ -
执行
python3 agent.py启动样例demo。(viki) jetson@jetson-Yahboom:~/viki$ python3 agent.py WARNING: Carrier board is not from a Jetson Developer Kit. WARNNIG: Jetson.GPIO library has not been verified with this carrier board, WARNING: and in fact is unlikely to work correctly. <USER>: -
按
ctrl+c键,可退出样例demo程序。
体验-抓颜色积木
-
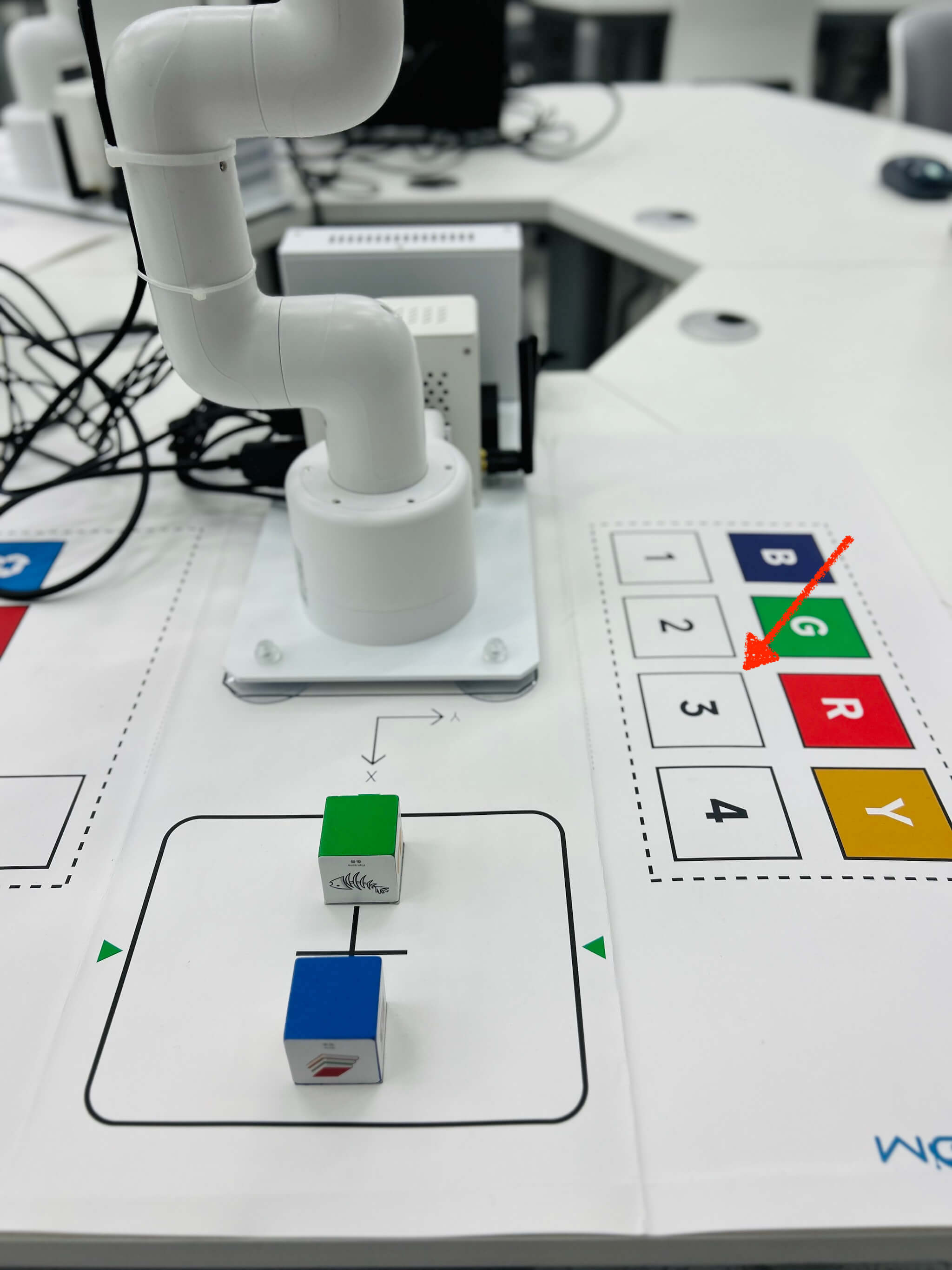
先在机械臂前面的桌面上放置待抓取的积木。
✅ 颜色面朝上
🚫 箭头虚线框区域没有积木
如下图所示:
-
抓取蓝色积木。输入
grab blue cube and move to -80,200<USER>:grab blue cube and move to -80,200 ... #################### <函数执行> #################### ************* [-80, 200] Objects arranged successfully #################### <函数执行> #################### <USER>: -
抓取绿色积木。输入
grab green cube and move to 0,200<USER>:grab green cube and move to 0,200 ... #################### <函数执行> #################### ************* [0, 200] Objects arranged successfully #################### <函数执行> #################### <USER>:
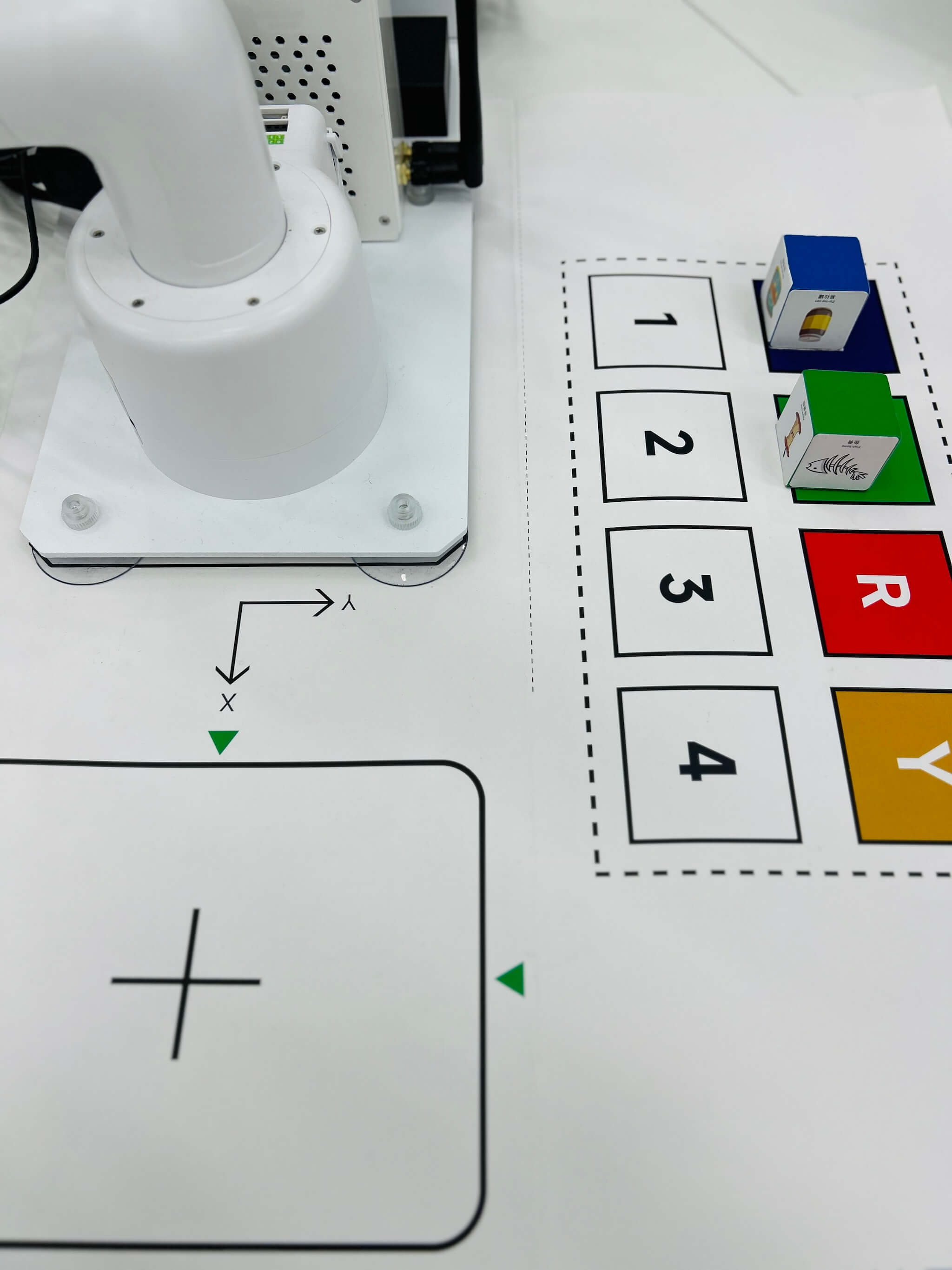
蓝色积木、绿色积木抓取移动后,如下图所示:
体验-堆叠积木
-
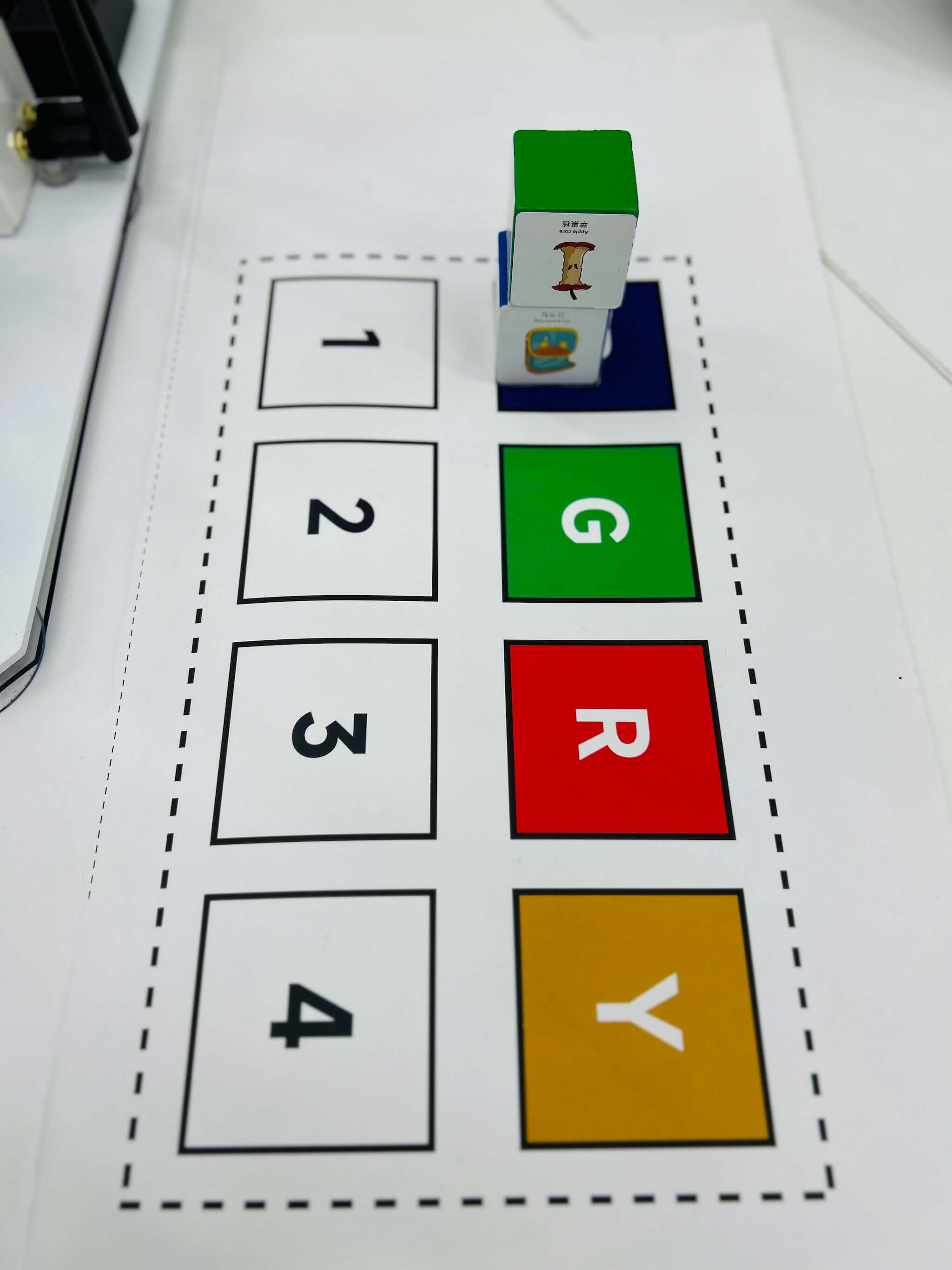
先在机械臂前面的桌面上放置待抓取的 2 个积木。
🚫 箭头虚线框区域没有积木
如下图所示:
-
然后在样例demo程序启动后的
<USER>:提示符后,输入:stack two cubes together<USER>:stack two cubes together ... #################### <函数执行> #################### ************* [-80, 200] Objects arranged successfully #################### <函数执行> #################### ... #################### <函数执行> #################### ************* [-80, 200] Objects arranged successfully #################### <函数执行> #################### <USER>:
2 个积木堆叠后,如下图所示:
关机
- 屏幕右上角:电源标志 → power off。
- 观察开发板小机箱的散热风扇。风扇停止后,按桌子下面的立方体插座上的开关,电源指示灯熄灭。
- 起身正对机械臂,将竖立的机械臂向前轻轻推倒,水平卧在 Jetson 开发板小机箱上即可。
🚫 电源线:不必从机械臂拔下来;也不必从桌子下面的插座上拔下来。
🚫 机械臂:水平自然卧倒在小机箱上即可。不必整理、扭成很好看的造型(可能导致下次启动时无法站立)。
椅子复原
椅子推到桌子下面。1 个桌子配备 6 个椅子。多余的椅子放到实验室的左右两侧。
带走物品
请带走个人物品。
附录
获取样例demo
-
在 Jetson 开发板上启动 浏览器
-
点击下载:e江南云盘链接↗
-
执行以下命令将下载的文件移动到 jetson 用户的 HOME 目录。浏览器下载文件通常存放在 jetson HOME 目录的 Downloads 子目录中。
mv ~/Downloads/viki2604.zip ~/. -
执行以下命令解压缩 zip 文件。解压缩完成后生成子目录 viki。
unzip viki2604.zip
==========
搭建Python虚拟环境
-
创建并激活 Python 3.9 虚拟环境
conda create -n viki python=3.9 conda activate viki虚拟环境激活后,命令行提示符首部有
(viki)字样:(viki) jetson@jetson-Yahboom:~$ -
安装样例demo需要的 Python 包
(viki) jetson@jetson-Yahboom:~$ pip3 install openai pyaudio numpy soundfile requests Pillow pymycobot==3.4.9 opencv-python Jetson.GPIO scipy机械臂相关的 pymycobot 安装 3.4.9 版本。否则后续运行样例demo会报错。
在激活的虚拟环境中安装 Python 包,不要安装到非虚拟环境或其他虚拟环境中。
如果 Jetson 开发板上没有 conda,请参考 第1步:安装conda。
相关说明
-
机械臂底座背部,和六角形空洞平齐。

-
整体外观如下。✅ 坐标原点,是机械臂底座上方圆柱体中心和底座的交点。
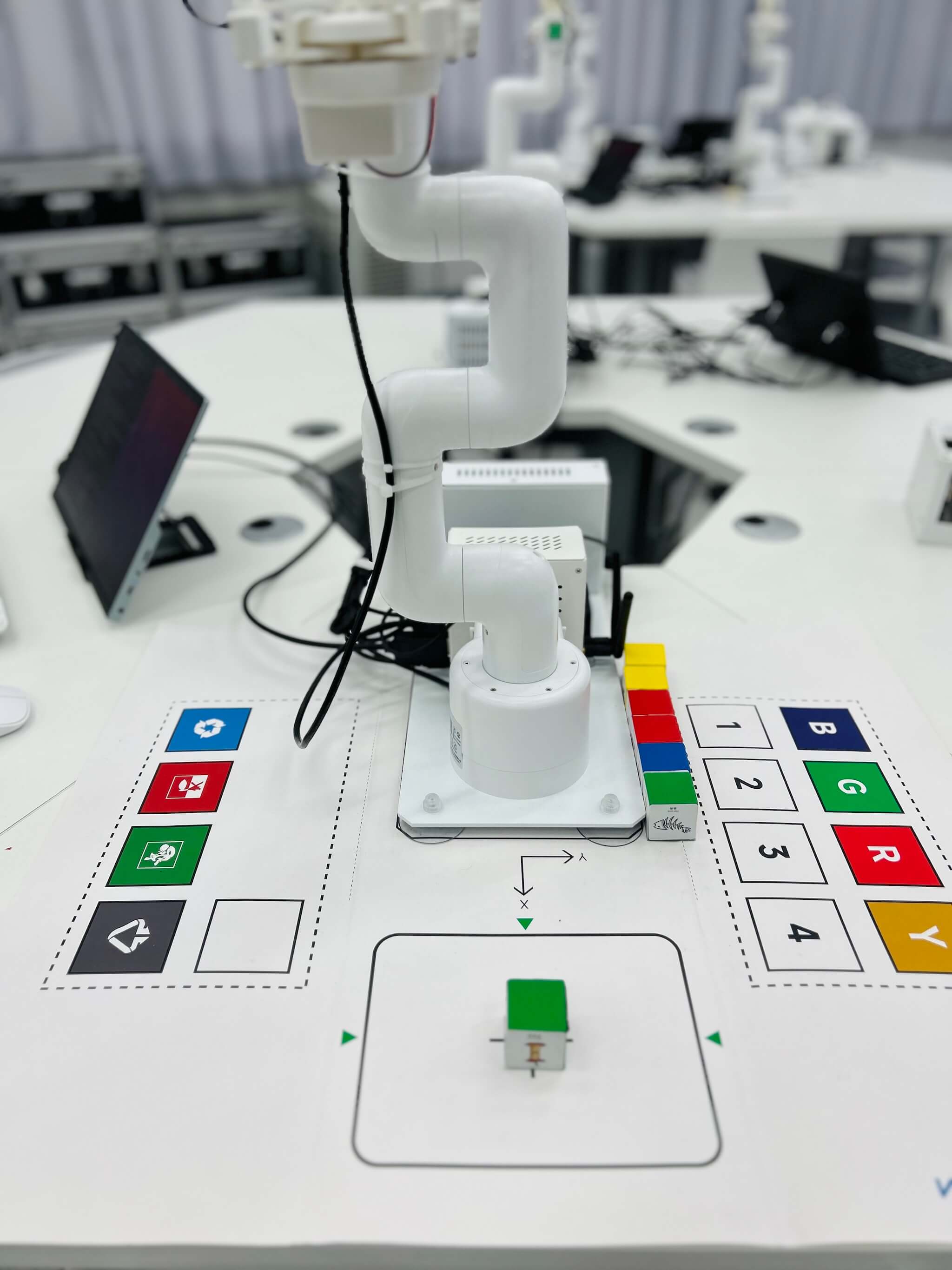
-
图纸样式如下。X、Y的箭头方向是正方向。Z的正方向是水平朝上。以
-80,200为例:移动到 X=-80、Y=200。Z默认是110。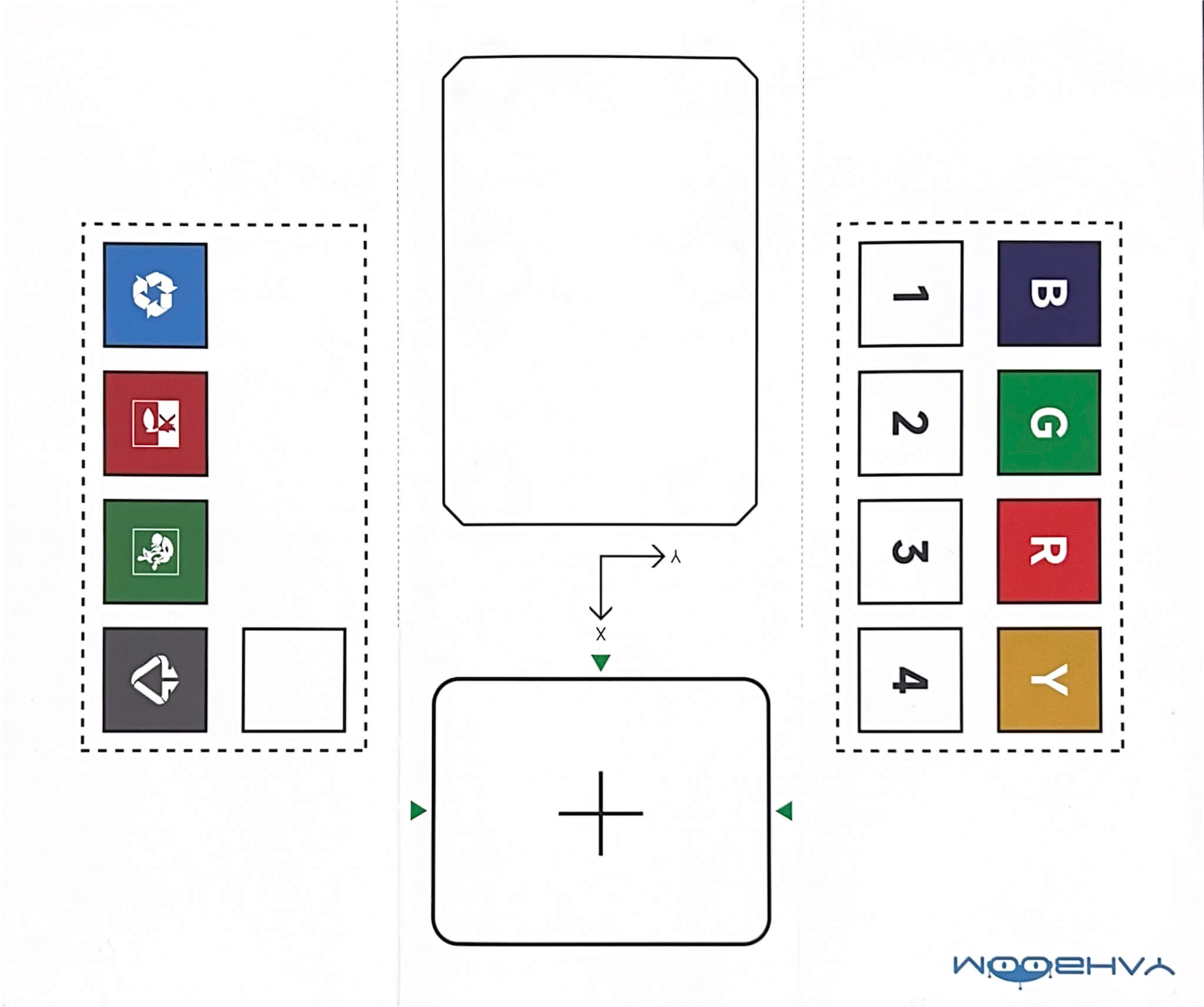
-
✅ 如果抓取不大准,可略微移动机械臂的位置。或者修改 config.json 中的 xyz 的数值。
{ "points_pixel": [ [320,220], [590,430], [72,31], [590,26] ], "points_arm": [ [210,0], [140, -80], [280,80], [280,-80] ], "x": 0, "y": 0, "z": 0, "voice":false, "threshold": 110 }可执行
vim config.json编辑文件。用 vim 打开文件后,删除字符:光标先移动到待删除字符,再按
esc键,再按x键。插入字符:光标先移动到待插入位置,先按
esc键,再按i键,然后输入字符。保存修改:先按
esc键,再输入:wq,再按回车键。放弃修改:先按
esc键,再输入:q!,再按回车键。