AI实验室教具使用说明New
更新-260327 | 发布-251101
目录
视觉实验箱
上电开机
- 视觉实验箱配有 1 个电源,一端连实验箱,另一端插头插在桌子下面的插座上。
- 桌子下面有个带开关的的立方体插座。按下开关,电源指示灯亮,即表明接通电源。
- 稍等片刻可完成启动。视觉实验箱的机械臂站立起来,且屏幕显示 Ubuntu 的主界面,就启动完成。
==========
熟悉 Linux
- ✅ 建议:如果还不大熟悉 Linux 命令和操作,尽量手敲以尽快熟悉。
- ℹ️ 信息:Jetson 开发板账号密码是 jetson / yahboom,如需要。比如在笔记本电脑上通过
ssh jetson@开发板IP地址登录开发板,。 - ✳️ 提示:在 Ubuntu 主界面左侧导航栏找到对应的 App,或者点击左下角 九宫格 Show Applications 后出现顶部搜索栏输入 App 的名字查找。
- ✳️ 提示:按
tab键可补齐文字,加快输入。假定当前目录下有 3 个子目录(face_mesh,gesture_recognizer,haar_detection),输入cd ges后按tab键,则补齐为cd gesture_recognizer/。 - ✳️ 提示:按
esc键后,再按↑↓箭头键,可以找到输入过的命令。不必每次都重复敲命令。 - ✳️ 提示:浏览器和其他图形界面中,复制/粘贴的快捷键是 ctrl + c 和 ctrl + v。
- ✳️ 提示:在 终端 Terminal App 中,复制/粘贴的快捷键是 ctrl + shift + c 和 ctrl + shift + v。
- ✳️ 提示:
win+←↑↓→箭头键,可排列屏幕。 - ✳️ 如果习惯使用 Chrome 浏览器,可以在终端中执行
sudo apt install chromium-browser安装。
开始 Linux 操作之旅……
-
启动浏览器访问网站
在 Jetson 开发板上启动 Firefox 浏览器 App(或者 Chrome 浏览器),输入网址访问,比如:
https://tnt.gdvzz.com/。 -
在 Jetson 开发板上启动 终端 Terminal App。
-
查看 IP 地址:
ifconfig | grep 172jetson@jetson-Yahboom:~$ ifconfig | grep 172 inet 172.17.0.1 netmask 255.255.0.0 broadcast 172.17.255.255 inet 172.18.139.99 netmask 255.255.255.0 broadcast 172.18.139.255类似于
172.18.139.99,就是 Jetson 开发板的 IP 地址。本实验室的 IP 地址都是 172.18.xxx.xxx。✳️ 如果还有
inet 172.22.22.201 netmask 255.255.0.0 broadcast 172.22.222.255(即屏幕显示了 3 行输出),则表示 WiFi 也开启了。建议不要同时连接网线和WiFi(可能会出现网络相关问题,比如无法远程 ssh 登录 Jetson 开发板)。连接网线时要关闭 WiFi:点击屏幕右上角(网络+喇叭+电源+箭头 连在一起的区域),选择第二行 WiFi 点开,点击 Turn Off。✳️ 如有网线断开了,还是点右上角,选择第一行 PCI Ethernet 点开,点击 Connect 重连就可。
-
创建/切换/显示当前目录:
mkdir ~/tmp2603 # 在用户的 HOME 目录下创建子目录 tmp2603 cd # 切换到 HOME 目录 pwd # 执行后屏幕应显示 /home/jetson cd ~/tmp2603 # 切换到 tmp2603 子目录 pwd # 执行后屏幕应显示 /home/jetson/tmp2603说明:pwd 是 Print Working Directory,显示当前所在的目录路径。
-
显示信息:
ls -l -
复制/改名
cd ~/tmp2603 # 先切换到 /home/jetson/tmp2603 echo "Hello, World!" > test.txt # 在当前目录下生成文件 test.txt cp test.txt hello.txt # 复制文件 test.txt 到 hello.txt mv hello.txt hiworld.txt # 修改文件 hello.txt 为 hiworld.txt ls -l # 列出当前目录下的文件 -
清除屏幕信息
clear
==========
获取样例demo
-
点击下载:e江南云盘链接↗
-
执行以下命令将下载的文件移动到 jetson 用户的 HOME 目录。浏览器下载文件通常存放在 jetson HOME 目录的 Downloads 子目录中。
mv ~/Downloads/vkai260325.zip ~/. -
执行以下命令解压缩 zip 文件。解压缩完成后生成子目录 vkai。
unzip vkai260325.zip
==========
搭建Python虚拟环境
-
创建并激活 Python 3.9 虚拟环境
conda create -n vkai python=3.9 conda activate vkaivkai 是虚拟环境的名字。可以是其他取值。
虚拟环境激活后,命令行提示符首部有
(vkai)字样。 -
安装样例demo需要的 Python 包
pip3 install openai pyaudio numpy soundfile requests Pillow pymycobot==3.4.9 opencv-python Jetson.GPIO scipy机械臂相关的 pymycobot 安装 3.4.9 版本。否则后续运行样例demo会报错。
在激活的虚拟环境中安装 Python 包,不要安装到非虚拟环境或其他虚拟环境中。
如果 Jetson 开发板上没有 conda,请参考 第1步:安装conda。
==========
启动和退出样例demo
-
进入样例demo程序所在目录
cd ~/vkai -
(可选)如尚未进入 vkai 虚拟环境,则先激活该虚拟环境
jetson@jetson-Yahboom:~$ conda activate vkai (vkai) jetson@jetson-Yahboom:~$ -
执行
python3 agent.py启动样例demo。 -
按
ctrl+c键,可退出样例demo程序。
==========
体验-抓移颜色积木
-
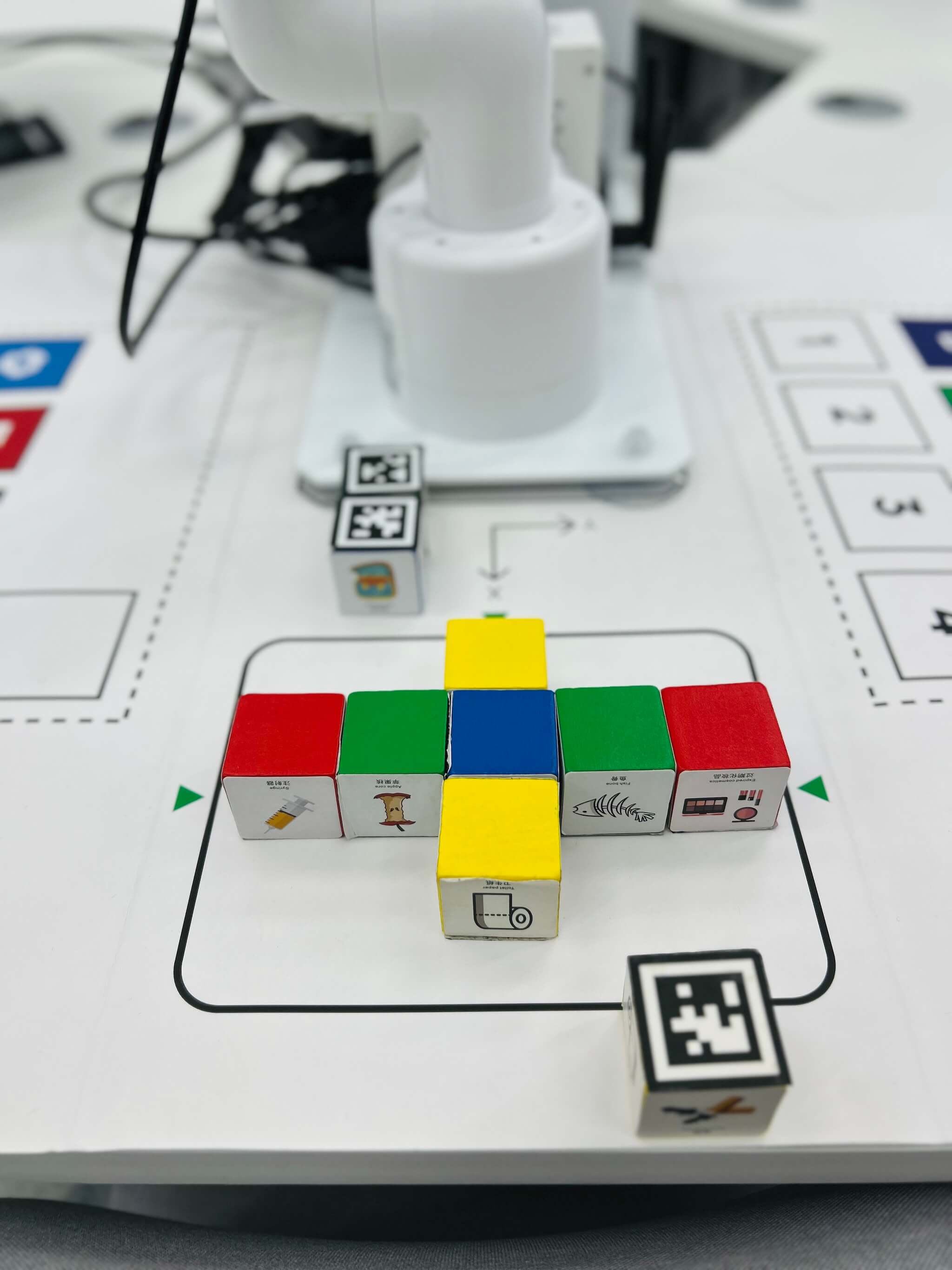
先在机械臂前面的桌面上放置待抓取的积木。✅ 颜色面朝上。
-
然后在样例demo程序启动后的
<USER>:提示符后,输入grab {颜色} cube and move to {xy坐标}指令体验,如下:grab blue cube and move to -80,200 grab green cube and move to 0,200 grab red cube and move to 80,200 grab yellow cube and move to 160,200
✳️ 建议:目标 {xy坐标},可以尝试 4 种组合之一:-80,200,0,200,80,200,160,200。
🚫 禁止:如果目标 {xy坐标} 已有积木,不能让机械臂抓积木再移动到相同坐标。否则可能导致机械臂损坏。
==========
体验-抓移垃圾
-
先在机械臂前面的桌面上放置待抓取的积木。✅ 图案面朝上。
-
然后在样例demo程序启动后的
<USER>:提示符后,输入grab {垃圾} and move to {xy坐标}指令体验,如下:grab fish bone and move to -80,200
✳️ 建议:目标 {xy坐标},可以尝试 4 种组合之一:-80,200,0,200,80,200,160,200。
🚫 禁止:如果目标 {xy坐标} 已有积木,不能让机械臂抓积木再移动到相同坐标。否则可能导致机械臂损坏。
==========
体验-堆叠积木
-
先在机械臂前面的桌面上放置待抓取的 2 个积木。
-
✅ 提前清空坐标 y 正方向空间。因为稍后积木将堆叠在此。
-
然后在样例demo程序启动后的
<USER>:提示符后,输入:stack two cubes together
🚫 禁止:坐标 y 正方向空间如已有积木,不要体验堆叠积木,要清空目标空间后体验。否则可能导致机械臂损坏。
==========
体验-排成圆圈
-
先在机械臂前面的桌面上放置待抓取的 6 个积木。在抓取范围内散开,分成 2*3 排列。
-
✅ 提前清空坐标 y 正方向空间。因为稍后积木将排在此处。
-
然后在样例demo程序启动后的
<USER>:提示符后,输入:grab six cubes and put as a circle
🚫 禁止:坐标 y 正方向空间如已有积木,不要体验排成圆圈,要清空目标空间后体验。否则可能导致机械臂损坏。
==========
相关说明
-
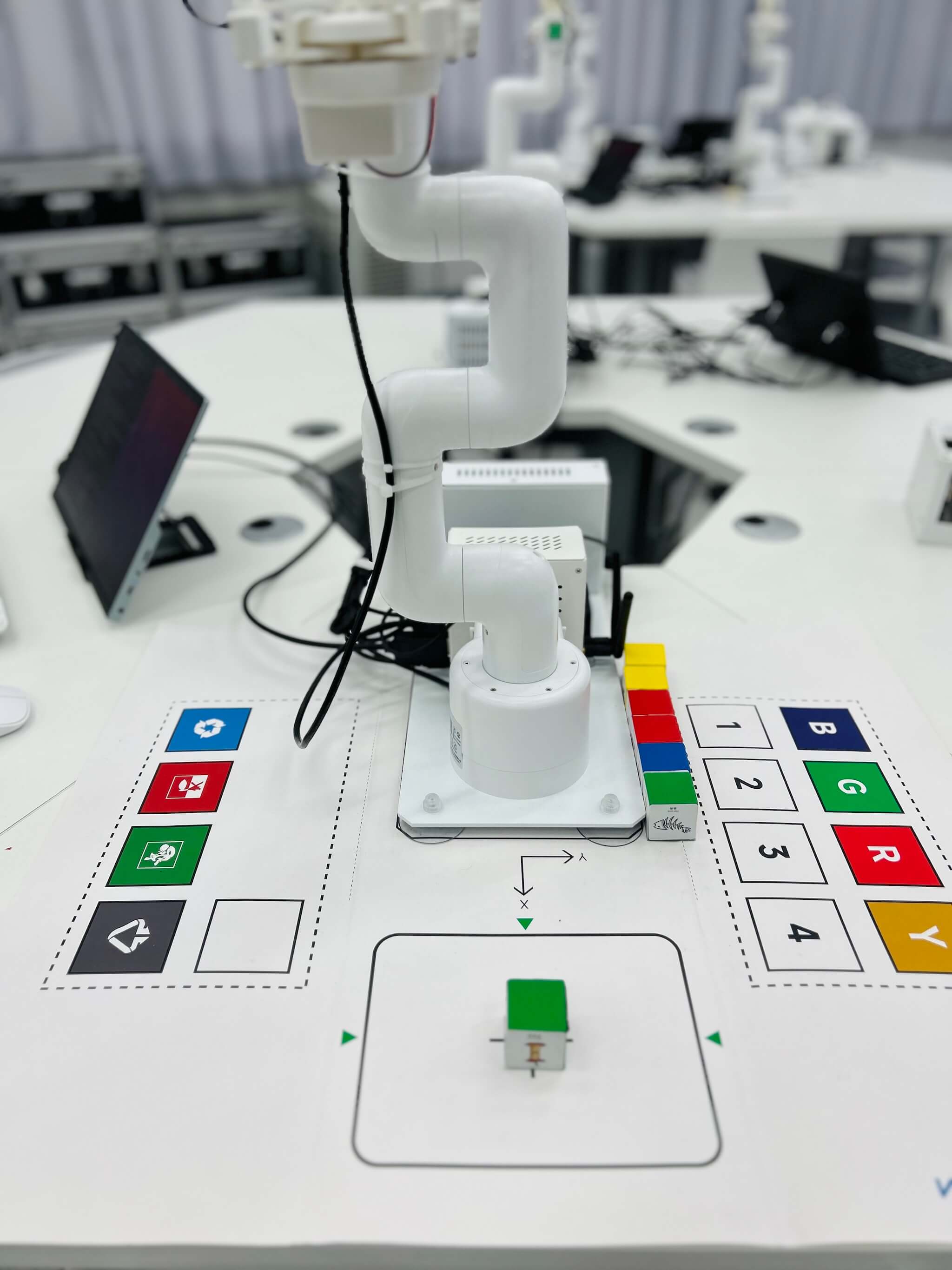
机械臂底座背部,和六角形空洞平齐。

-
待抓取积木放置范围:距离桌面边缘约 1 个积木位置,距离机械臂约 2 个积木位置,范围大约是 3 * 5 个积木。
-
整体外观如下。✅ 坐标原点,是机械臂底座上方圆柱体中心和底座的交点。
-
图纸样式如下。X、Y的箭头方向是正方向。Z的正方向是水平朝上。以
-80,200为例:移动到 X=-80、Y=200。Z默认是110。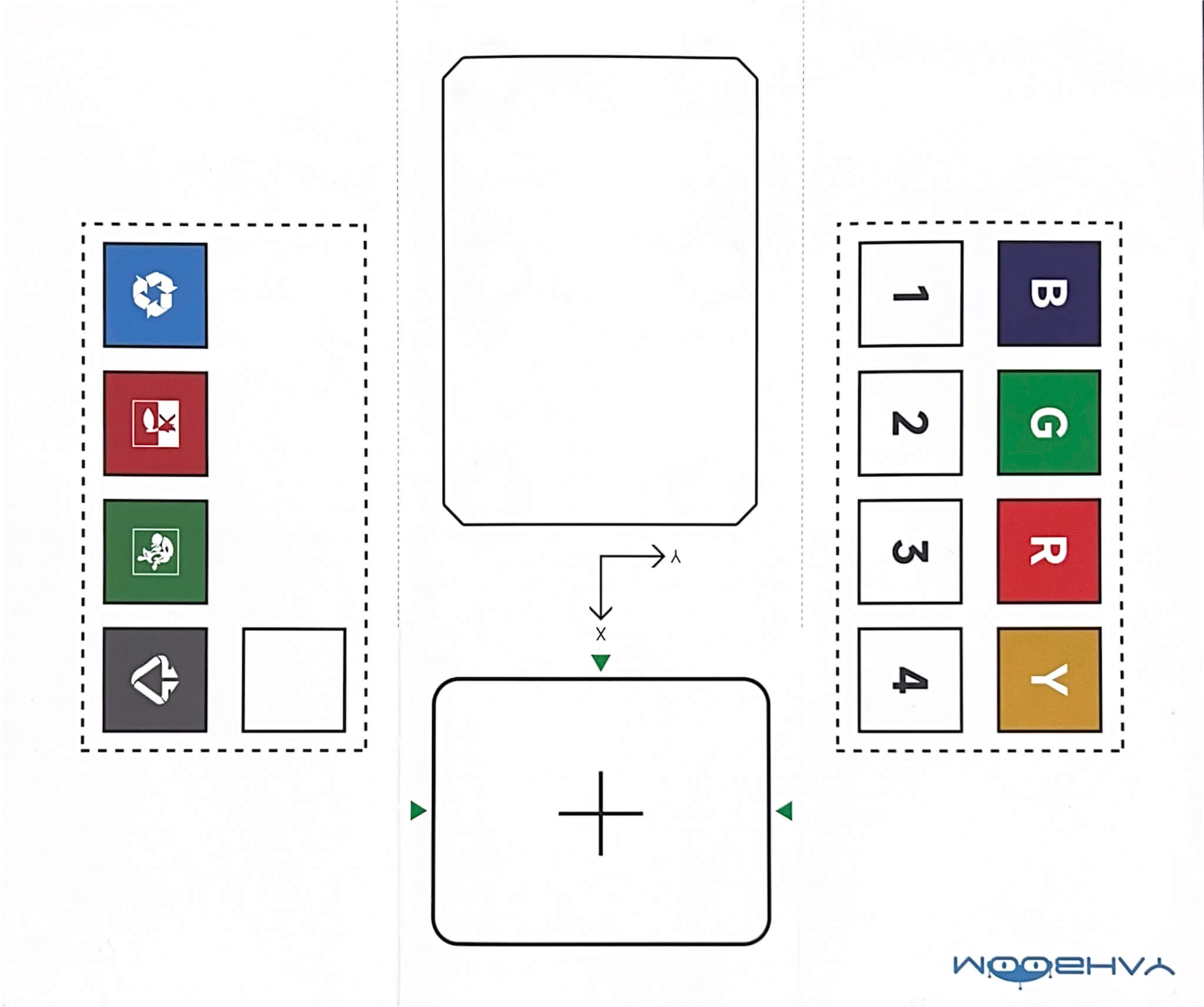
-
✅ 如果抓取不大准,可略微移动机械臂的位置。或者修改 config.json 中的 xyz 的数值。
{ "points_pixel": [ [320,220], [590,430], [72,31], [590,26] ], "points_arm": [ [210,0], [140, -80], [280,80], [280,-80] ], "x": 0, "y": 0, "z": 0, "voice":false, "threshold": 110 }可执行
vim config.json编辑文件。用 vim 打开文件后,删除字符:光标先移动到待删除字符,再按
esc键,再按x键。插入字符:光标先移动到待插入位置,先按
esc键,再按i键,然后输入字符。保存修改:先按
esc键,再输入:wq,再按回车键。放弃修改:先按
esc键,再输入:q!,再按回车键。
==========
关机
- 在终端中执行关机命令
shutdown -h now。或者屏幕右上角:电源标志 → power off。 - 观察开发板小机箱的散热风扇。风扇停止后,按桌子下面的立方体插座上的开关,电源指示灯熄灭。
- 起身正对机械臂,将竖立的机械臂向前轻轻推倒,水平卧在 Jetson 开发板小机箱上即可。
🚫 电源线:不必从视觉实验箱拔下来;也不必从桌子下面的插座上拔下来。
🚫 机械臂:水平自然卧倒在小机箱上即可。不必整理、扭成很好看的造型(可能导致下次启动时无法站立)。
椅子复原
椅子推到桌子下面。1 个桌子配备 6 个椅子。多余的椅子放到实验室的左右两侧。
带走物品
请带走个人物品。